Hemisphere, 2008
Proximity Sensor Based Gesture Recognition For Social Robot Interaction
Sheng Kai Tang
COmputational DEsign Lab, CMU
Abstract
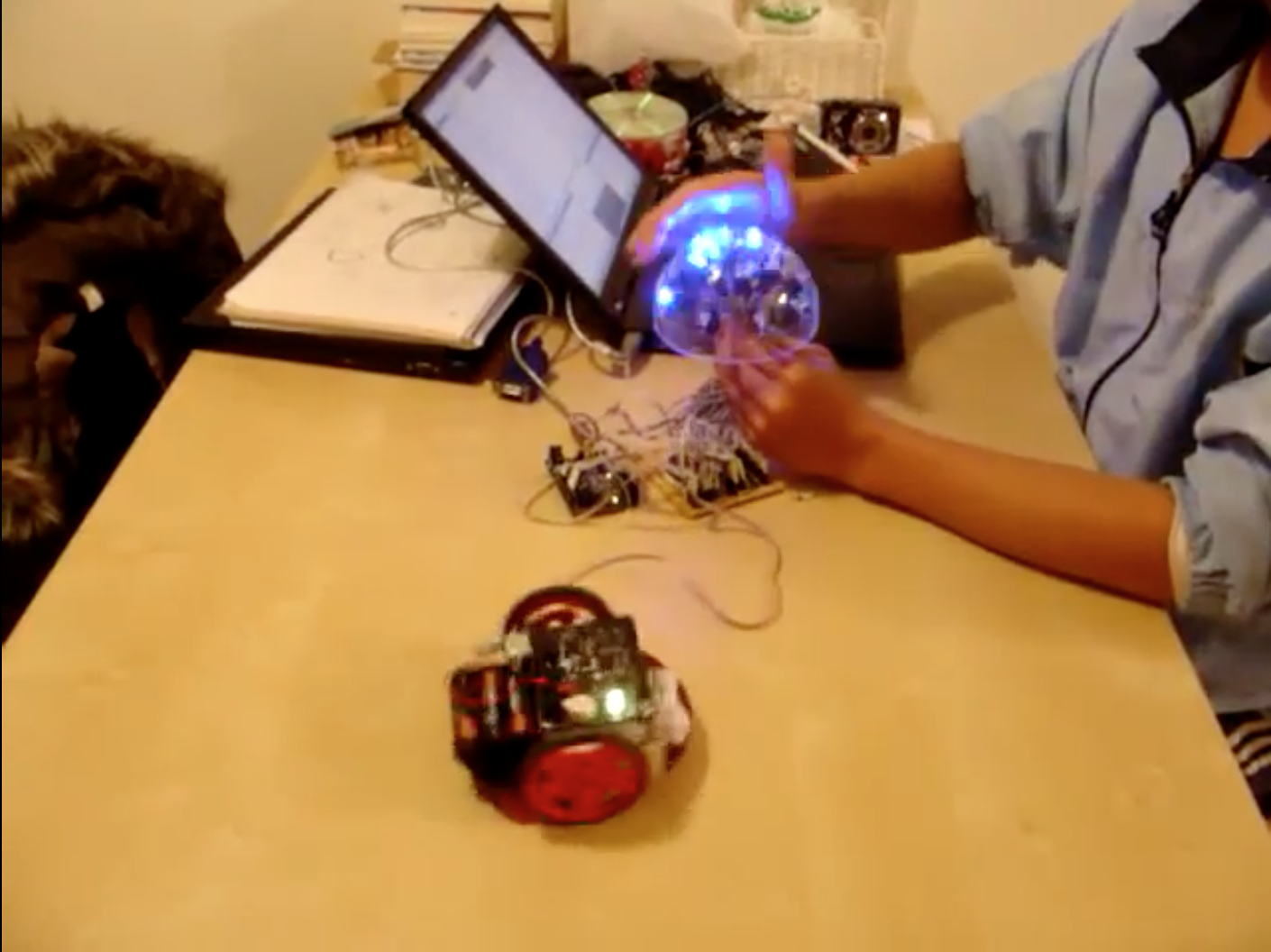
In this project, we developed a hemisphere control device, that equipped 16 proximity sensors to recognize user's intuitive gesture commands for robotic car control.
Documentation
Tang, S.K.: 2007, Hemisphere: An Intuitive Tangible User Interface for Controlling Domestic Robot, Final Report for "Computational Beauty of Nature" offered by Prof. Ramesh Krishnamurti.